3.1 - Working With Motors in Code
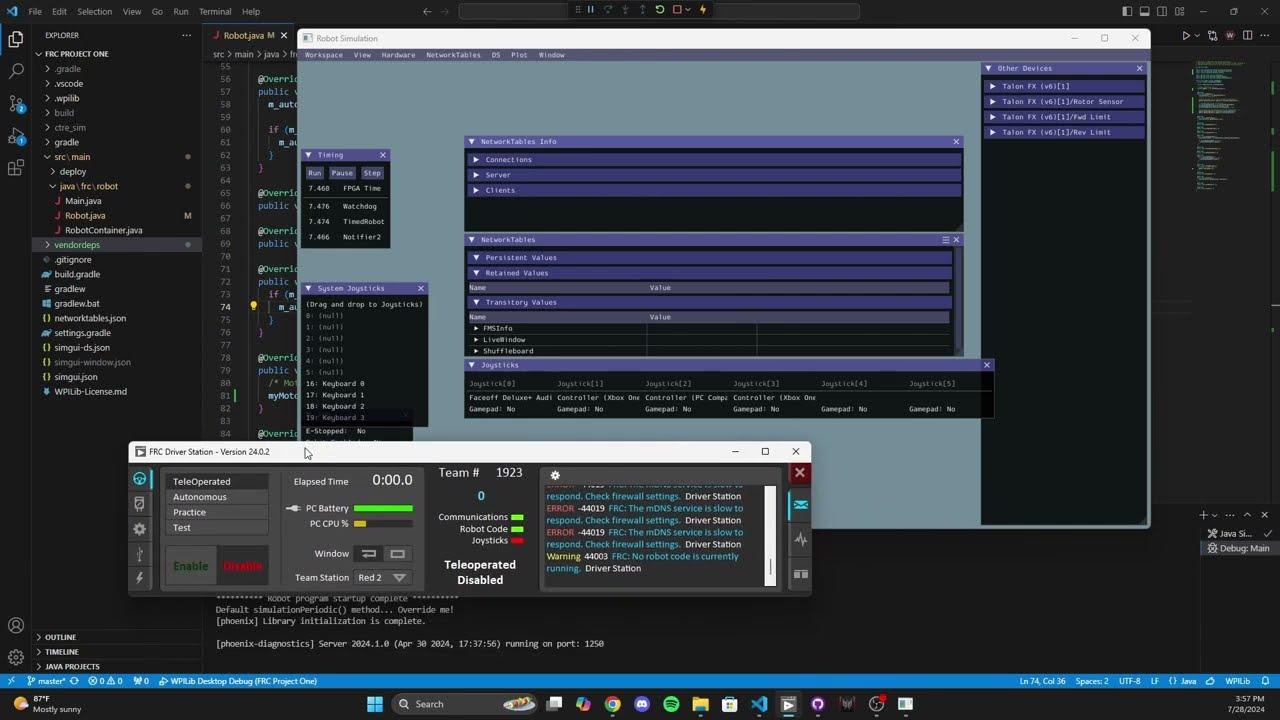
This lesson covers writing motor control code for your robot, including downloading the Phoenix Vendor Library, configuring the motor, setting percent output, and using the simulator to test functionality.
This lesson covers writing motor control code for your robot, including downloading the Phoenix Vendor Library, configuring the motor, setting percent output, and using the simulator to test functionality.
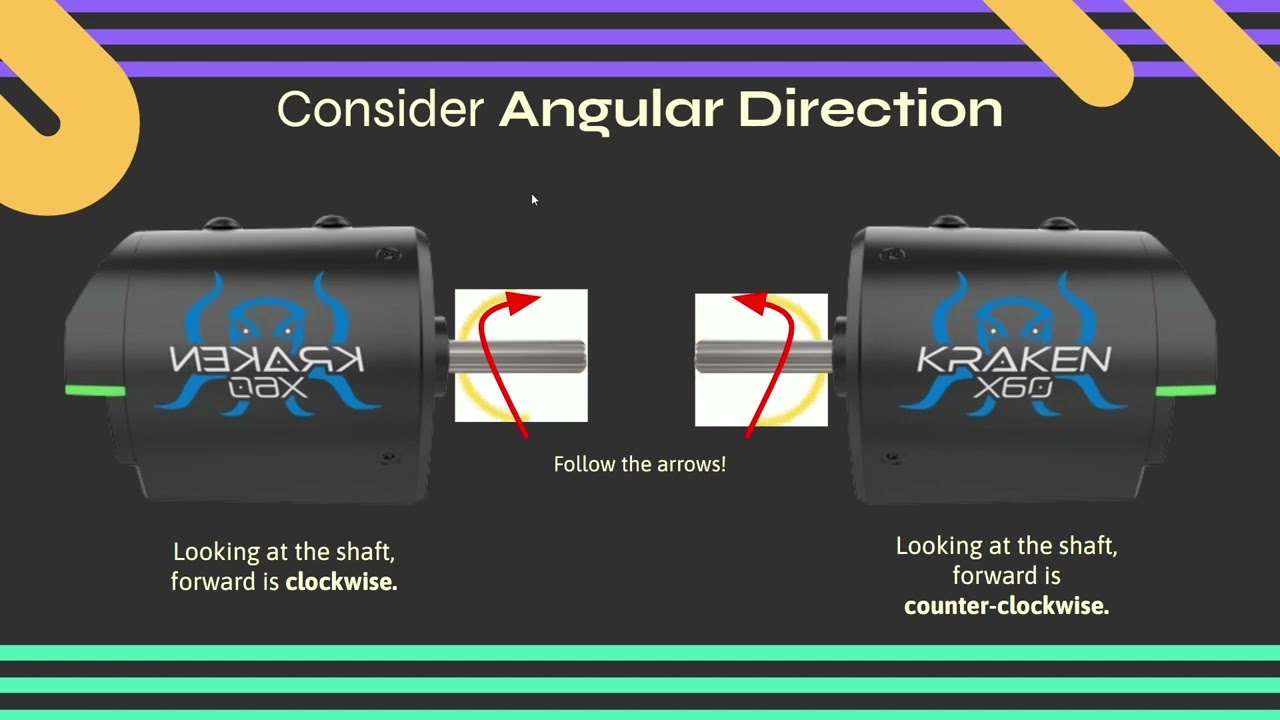
This lesson teaches you how to code multiple motors using individual control or the CTRE follower library, focusing on configuring follower motors and inverting outputs for correct direction.
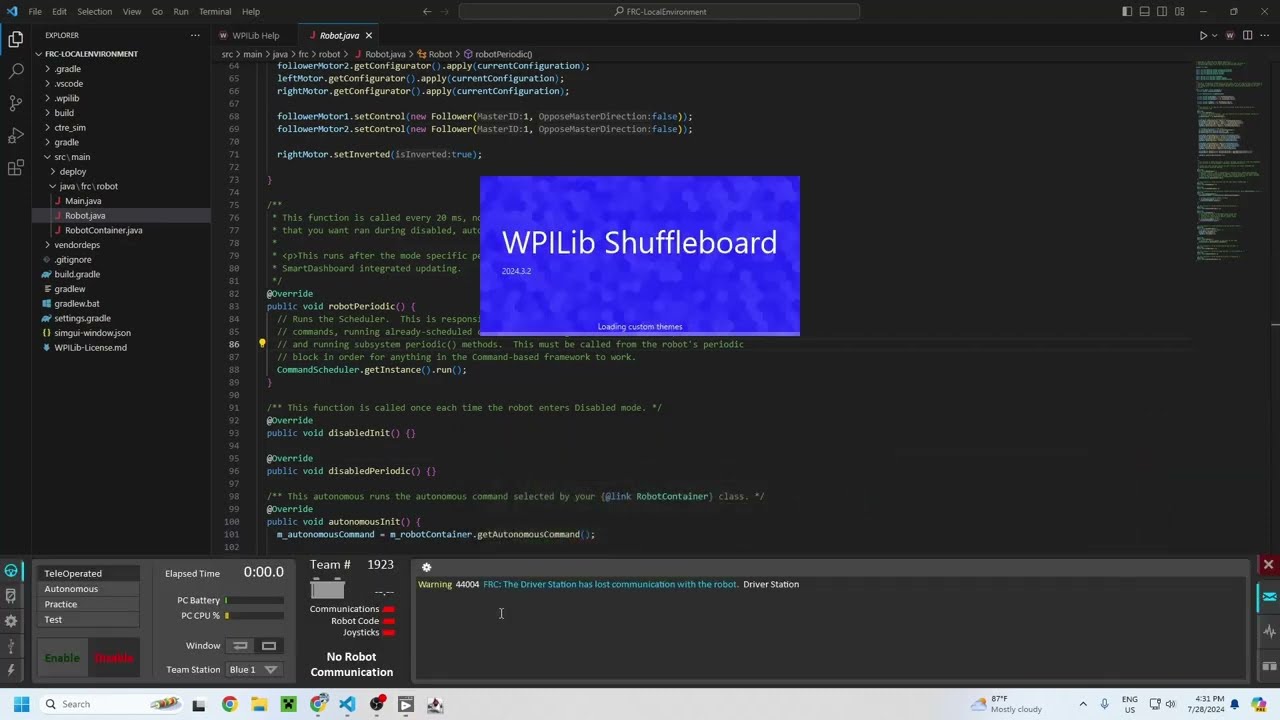
This lesson covers Shuffleboard, teaching you how to display and monitor real-time robot data, navigate its interface, and use periodic methods for updates.
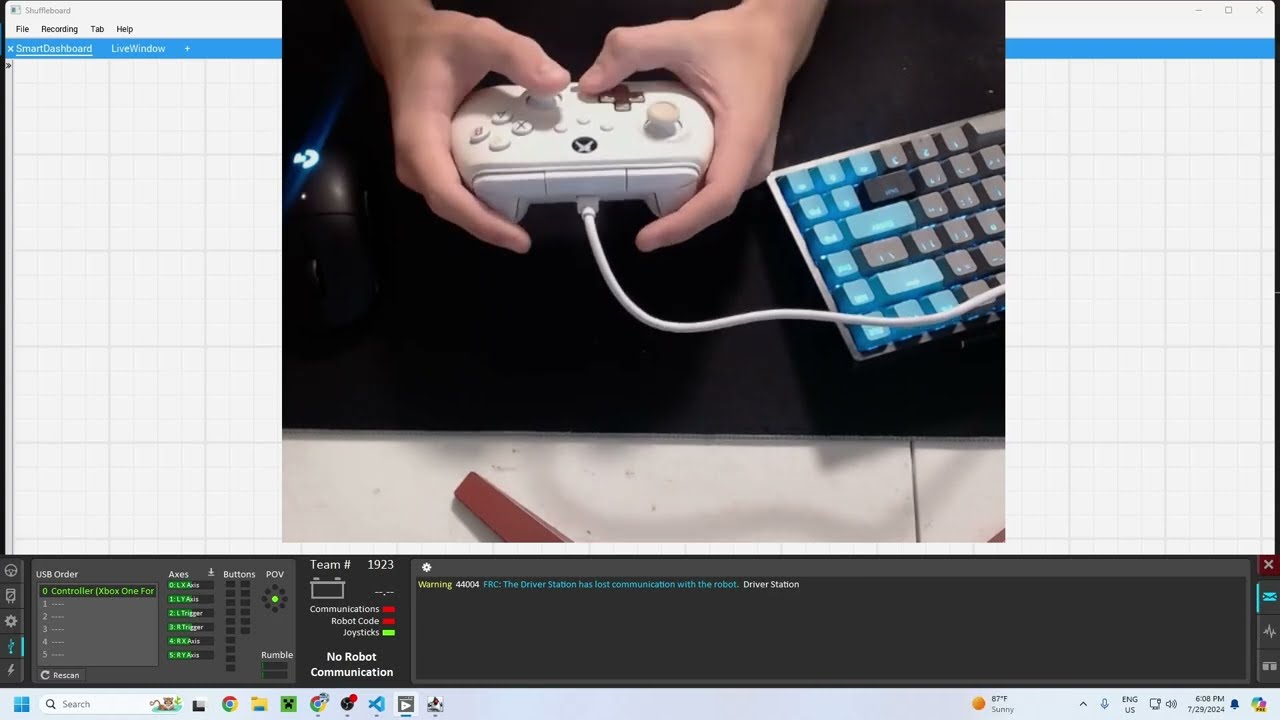
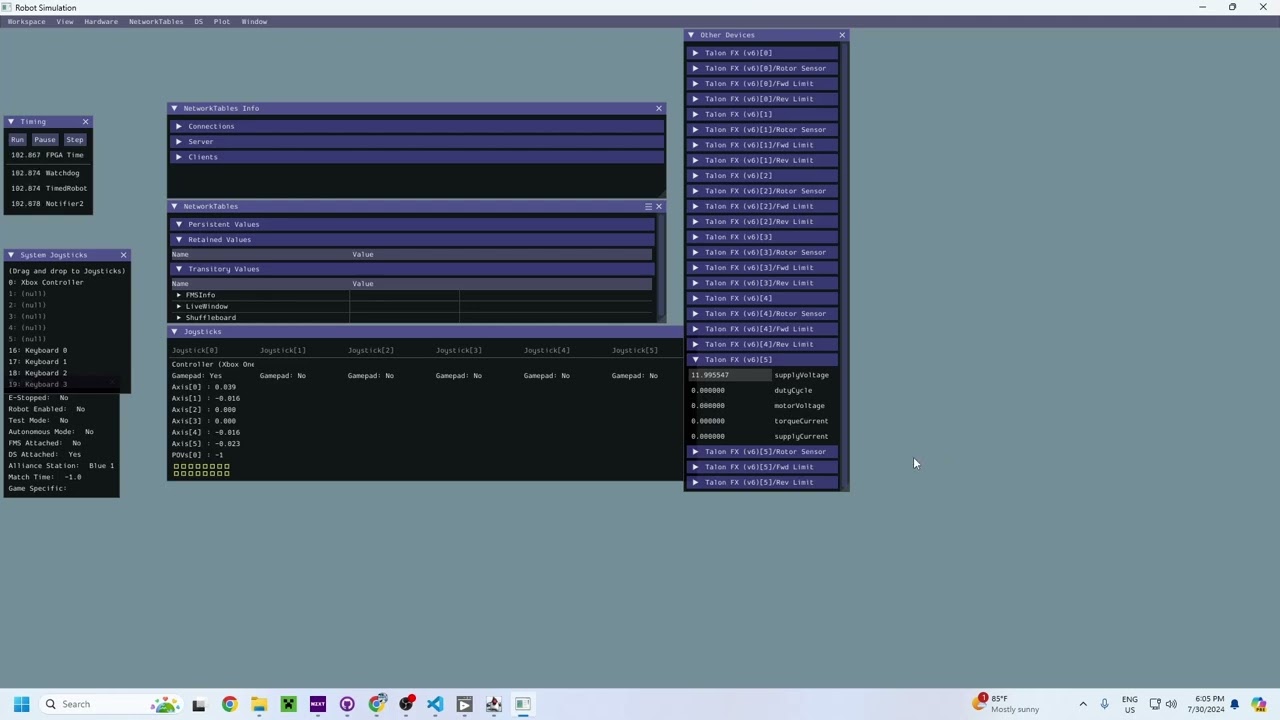
This lesson teaches students how to connect a joystick to the driver station, integrate it into robot code, and control motors using joystick inputs, including managing deadzones for accurate control.

This lesson introduces Project 1, where you'll implement a tank drive system, control a shooter motor with a button, and create an elevator motor with a toggle function for a maximum of five seconds.
This lesson covers effective debugging, from resolving build errors using VSCode’s autocomplete to troubleshooting runtime crashes and functionality issues like a motor failure or elevator malfunction.