
5.1 - Intro to PID
This lesson introduces PID control, explaining its components (Proportional, Integral, Derivative) through analogies and graphs, and guiding you through tuning the parameters for precise speed and position control.
This lesson introduces PID control, explaining its components (Proportional, Integral, Derivative) through analogies and graphs, and guiding you through tuning the parameters for precise speed and position control.
This lesson covers setting up PID for velocity control on a shooter subsystem, including configuring PID values, controlling motor velocity in RPM, and troubleshooting issues in simulation environments.
This lesson covers implementing feedforward control with the CTRE Phoenix 6 motor controller, focusing on the kS (static feedforward) term to maintain the desired voltage when the motor is stationary.
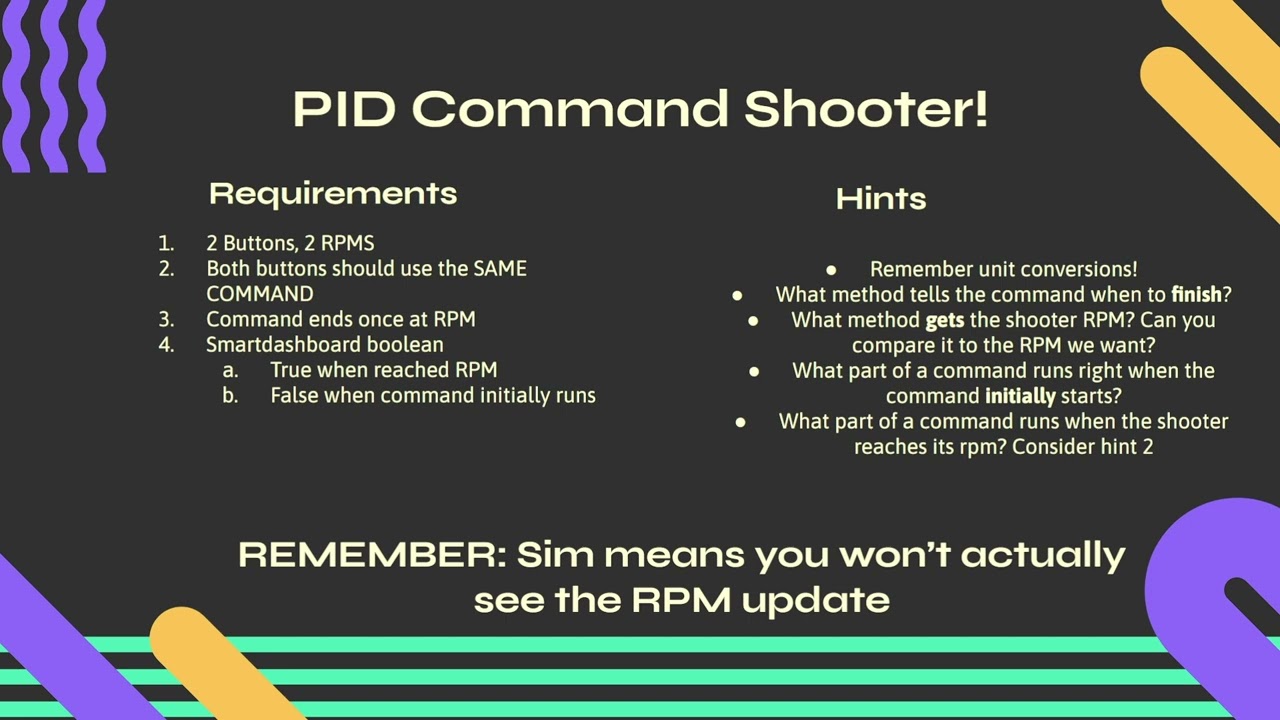
This lesson guides students through a PID-controlled shooter project, setting RPM targets (1000 and 2000) with button presses. The command finishes when the shooter reaches the target RPM, with students checking RPM values and using a SmartDashboard boolean to indicate shot status.